We have proposed a stabilization method of
unstable periodic orbits embedded within
a chaos attractor[1].
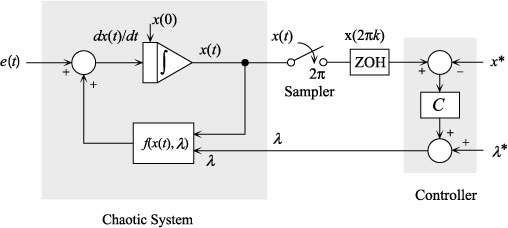
Basic point of this control is the linearization for
specified fixed/periodic point.
Using small perturbations of the parameter as a control value.
The controller is designed by the discrete dynamical system
which is derived by linearization with Poincare mapping.
Schematic control design can be available.
Based on pole assignment technique. The combination of poles
stabilizing a specific chaos can be chosen theoritically.
The OGY method is included in these combinations.
Example of Duffing's equation
Before the controlling:
A chatic attractor (Red line) with its Poincare mapping (Blue points)
After the controlling:
Stabilized a 3-periodic orbit (Blue line)
embedded within the chaotic attractor.
Now, we are developping practical engineering applications; chaotic
circuits, stepping motors, the pendulum driven by an external periodic
force, etc., and also investigate to apply this method for
higer-order or autonomous chaotic systems.
As a second project, we try to stabilize a chaos by continuous
state feedback. (from Oct. 1998)
References
T.Ueta and H.Kawakami, ``Composite Dynamical System for Controlling
Chaos,''
IEICE Trans. Fundamentals,
Vol. E78-A, No.6, pp.708-714, 1995.
T.Ueta and H.Kawakami, ``A Study of the Pendulum Equation
with a Periodic Impulsive Force -- Bifurcation and Control --,''
IEICE Trans. Fundamentals,
Vol. E78-A, No.10, 1995.
T. Ueta, G. Chen and T. Kawabe,
``A Simple Approach to Calculation and Control of Unstable
Periodic Orbits in Chaotic Piecewise Linear Systems,''
International Journal of Bifurcation and Chaos, Vol. 11, No.1, 2001.
(in press).